
آشنایی با روش کار موتور براشلس و آموزش ساخت موتور DC بدون براش ساده
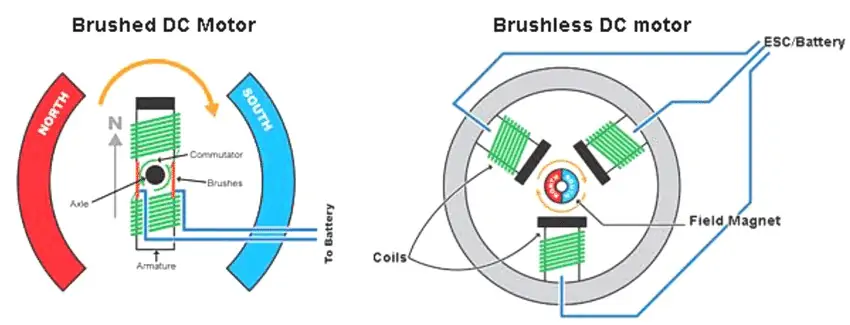
موتورهای الکتریکی که با برق مستقیم یا DC کار میکنند، به دو گونهی کلی دارای جاروبک یا براش و بدون براش یا Brushless تقسیم میشوند. موتورهای براشلس قدرت و سرعت بسیار بالایی دارند و معمولاً در ساخت پهپاد و کوآدکاپتر و هلیکوپترهای کوچک الکتریکی و برخی موارد دیگر، استفاده میشوند.
در این آموزش میخواهیم با روش کار موتور براشلس آشنایی مقدماتی پردا کرده و با استفاده از مگنتهای نئودیومی و سیم پیچ، یک موتور براشلس ساده بسازیم. با ما باشید.
هدف اصلی ما در این آموزش، آشنایی مقدماتی با روش کار موتورهای Brushless است که در ساخت محصولات سفارشی و جالب، مفید واقع میشود. به علاوه میتوانید از ساختار موتورهای DC بدون براش در طراحی محصولات خلاقانه استفاده کنید.

مواد لازم:
- ۲ عدد مگنت یا آهنربای قوی از جنس نئودیوم
- روتور یا بخش چرخان که با بیرینگهایی مثل بلبرینگ استاندارد شمارهی ۶۰۸ZZ ساخته میشود
- سیمپیچ برای ایجاد آهنربا
- پیچ از جنس فولاد
- بردبورد برای بستن سادهی مدار
- سوییچ Reed که با اعمال میدان مغناطیسی قطع و وصل میشود
- ترانزیستور
- دیود هرزگرد یا Flyback Diode که ضربهگیر ولتاژ القایی از بارهای سلفی در مدار است
- مقاومت ۲۰ اهمd
- لامپ LED
- منبع تغذیه DC با ولتاژ ۶ ولت که میتواند ۴ باتری قلمی ۱.۵ ولتی سریشده باشد
روتور دستساز
قسمتی از موتور که میچرخد را Rotor میگویند و بخش ثابت نیز Stator نام دارد. در موتورهای Brushless معمولاً مگنت یا قطعهی آهنربای دائم روی روتور قرار دارد در حالیکه در موتورهای DC معمولی و آرمیچرها، آهنربای دائمی روی پوستهی دور موتور ثابت شده است.
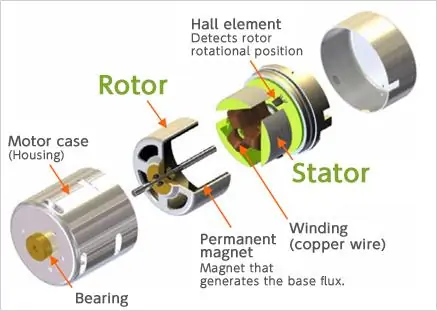
از طرفی موقعیت سیمپیچی که آهنربای موقت را ایجاد میکند در موتورهای DC معمولی، روی روتور است در حالیکه در موتور براشلس، سیمپیچ روی پوسته یا بخش ثابت است. بنابراین به Brush برای انتقال جریان الکتریکی به سیمپیچ در حال دوران نیاز نیست.
و آنچه روتور و استاتور محصول دستساز ماست:
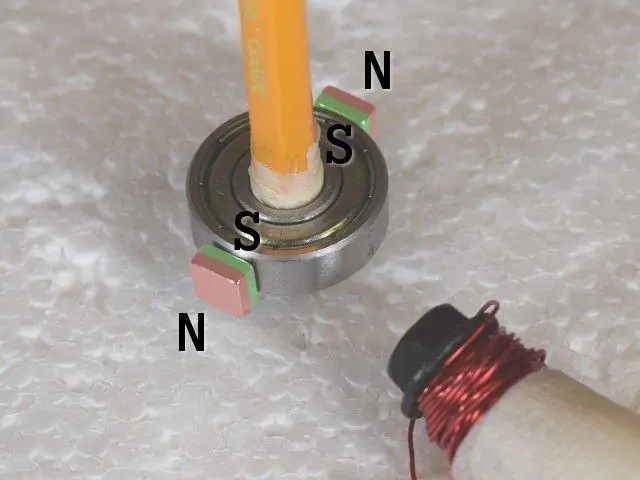
در محصول دستساز ما از یک بلبیرنگ ساده و استاندارد یعنی شمارهی ۶۰۸ استفاده شده که البته محافظ فلزی در هر دو سمت آن وجود دارد و به اصطلاح نوع ZZ است. مدادی را به عنوان بخش ثابت در بلبیرینگ محکم کردهایم و قرار است حلقهی بیرونی بلبیرینگ نقش روتور را ایفا کند. به بیان دیگر با سرعت بالایی بچرخد.
همانطور که در تصویر فوق مشاهده میکنید، دو مگنت نئودیومی نیز روی حلقهی خارجی بلبیرینگ قرار گرفته است. ابعاد این دو مگنت ۱/۴ اینچ در ۱/۴ اینچ در ۱/۸ اینچ و به عبارتی دیگر شمارهی B442 است. مگنتها ۱۸۰ درجه اختلاف موقعیت دارند و دقیقاً روبروی هم هستند. به بیان دیگر قطب شمال یا N در جهت مخالف است.
چگونه موتور براشلس میچرخد؟
برای ایجاد نیرویی که منجر به حرکت روتور شود، به آهنربای دیگری نیاز داریم که قطب شمال آن به سمت قطب شمال یکی از مگنتها قرار گرفته و موجب چرخش روتور شود. به عبارت دیگر از دافعهی مغناطیسی استفاده میکنیم. البته این روش فقط موجب چرخش روتور در حدود نیم دور میشود. برای ادامهی چرخش، میبایست آهنربایی که نزدیک شده، فاصله بگیرد و مجدداً نزدیک شود یا روش دیگر این است که از آهنربای موقت استفاده کنیم که مرتباً خاصیت آهنربایی آن قطع و وصل میشود.
بنابراین از الکترومگنت استفاده میکنیم. به عبارت دیگر یک سیمپیچ دور فلزی که میتواند خاصیت آهنربایی موقت دارد، پیچیده میشود و جریان الکتریکی از سیمپیچ عبور میکند و سریعاً جریان قطع و وصل میشود.
زمانبندی بسیار مهم است. زمانی که مگنت نزدیک آهنربای موقت میشود و اندکی از آن گذر میکند، میبایست جریان برق از سیمپیچ الکترومگنت عبور کند و آن را آهنربا کند و پس از کمی چرخش روتور، جریان قطع شود تا روتور نیم دور بچرخد و مگنت بعدی روبروی آهنربای موقت قرار گیرد و این چرخه مرتباً تکرار میشود.
در تصویر زیر دو بخشی که با کلمهی On مشخص شده، بخشی است که جریان الکتریکی از سیم پیچ عبور میکند و در سایر زوایای روتور، جریان قطع یا Off است.
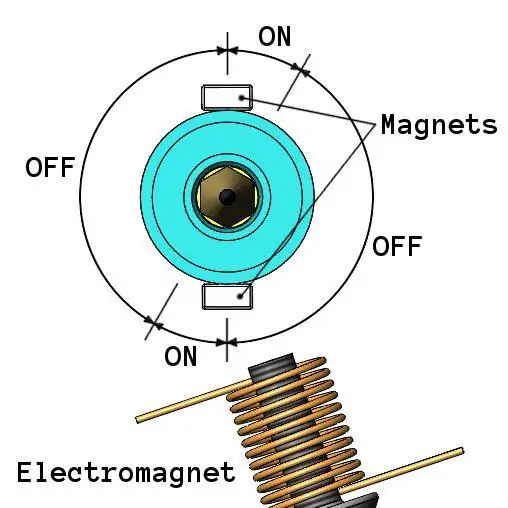
در این طرح ساده و آموزشی از پیچی که جنس آن فولاد است و سیم لاکی مسی ۲۴ گیج که در حقیقت قطر آن ۰.۰۲۵۴ اینچ است، برای ساخت آهنربای موقت استفاده میشود.
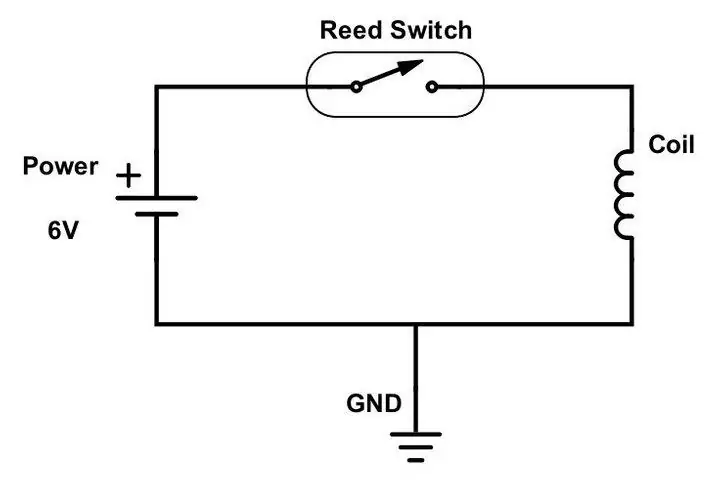
قطع و وصل شدن خودکار مدار با سوییچ Reed
برای قطع و وصل شدن مدار آهنربای موقت در زمان صحیح، میبایست از سوییچ Reed استفاده شود که با تحریک مغناطیسی عمل میکند. به عنوان مثال میتوان سوییچ را مثل تصویر زیر در بخش فوقانی مدار قرار داد تا به محض نزدیک شدن مگنت، فعال شود و آهنربای موقت را ایجاد کند. با کمی چرخش، طبعاً سوییچ آف میشود و آهنربای موقت به فلزی بدون خاصیت آهنربایی تبدیل میشود.
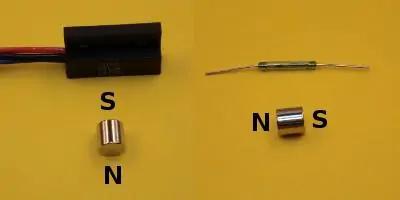
سوییچ رید یک قطعهی استوانهای با ظاهر شیشهای است که درون آن دو قطعهی فرومغناطیس در فاصلهی اندکی از هم قرار گرفته است. بنابراین اگر میدان مغناطیسی با قدرت کافی در مجاورت آن باشد، قطعات فرومغناطیس تماس پیدا کرده و مدار متصل میشود. دقت کنید که سوییچ Reed میبایست همراستای آهنربا باشد تا صحیح عمل کند.
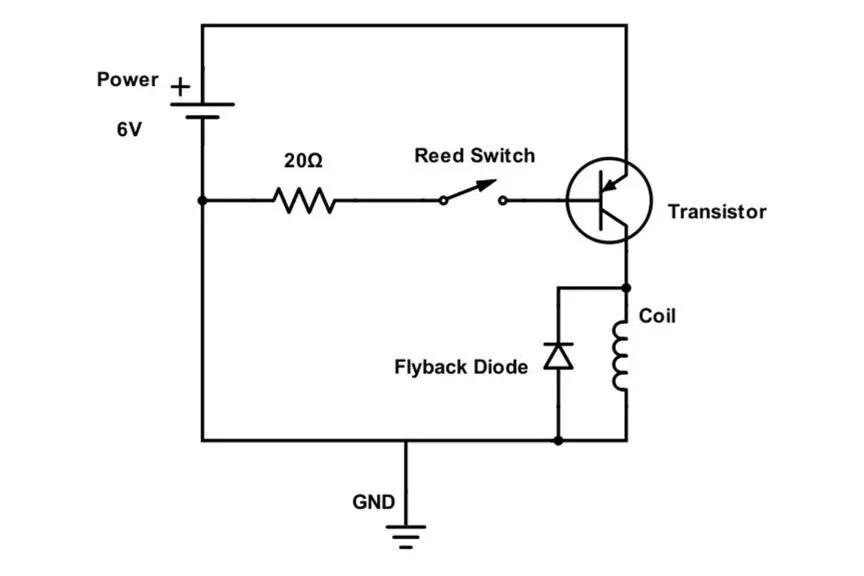
اگر مدار را به شکل سادهی قبلی ببندید، مدت کوتاهی کار میکند اما سریعاً با مشکل مواجه میشود. علت این است که جریان الکتریکی زیادی از سوییچ Reed عبور میکند و دو قطعهی ظریف فرومغناطیسی آن، در اثر داغ شدن، به هم جوش میخورد!
برای حل کردن مشکل، یک ترانزیستور به مدار اضافه شده است. به این ترتیب جریانی که آهنربای موقت لازم دارد، از سوییچ reed عبور نمیکند بلکه سوییچ رید به ترانزیستور متصل میشود و ترانزیستور را قطع یا وصل میکند. در این حالت ترانزیستور است که جریان الکتریکی اصلی را عبور میدهد. توجه کنید که ترانزیستورها نیز اساساً سوییچ On و Off کردن مدار هستند اما مثل سوییچ ظریف reed، ضعیف نیستند.
در مدار نهایی یک دیود Flyback یا دیود ضدضربه نیز اضافه شده است با این هدف که جلوی جریان معکوسی که از سیمپیچ آهنربا برمیگردد را بگیرد و ترانزیستور مشکل پیدا نکند.
و در نهایت چرخش موتور DC براشلس دستساز را تماشا کنید:
توجه کنید که برای نمایش بهتر خاموش و روشن شدن مدار آهنربا، از LED استفاده شده است و نقش دیگری در این محصول دستساز ندارد.
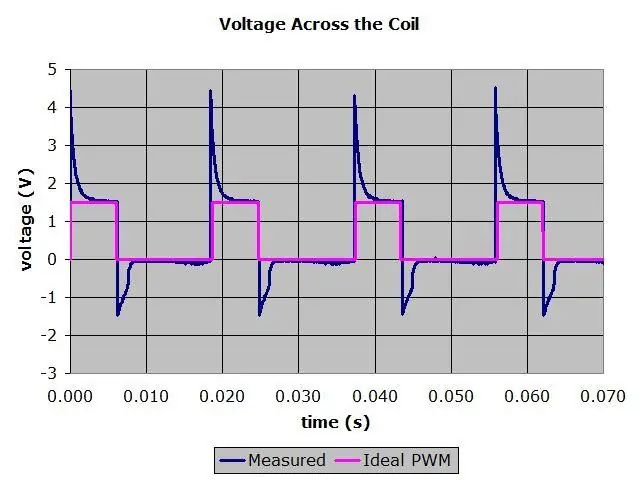
در تصویر زیر ولتاژ الکتریکی آهنربای موقت را مشاهده میکنید که شبیه به PWM است اما ایدهآل نیست.
توجه کنید که موتورهای براشلس ممکن است سه سیمپیچ یا تعداد زیادی سیمپیچ برای حرکت پیوسته و نیرومند داشته باشند.

instructablesزاگرس رباتیک
درود بر شما ..به یک عدد موتور براشلس ۲۰ کیلو واتی احتیاج دارم با ابعادی حدودی ارتفاع ۱۸سانت وطول حدودا ۲۰تا ۵۰سانتیمتر یعنی شبیح موتور کولر آبی ۴۵۰۰ولی حالا یه خورده کشیده تر با با گشتاور پاین یعنی بین ۱۵تا ۳۰..یا حداقل نقشه سیم کشی یا ساختشو ..موتور برای استفاده در موتور سیکلت میباشت اما به گونه ای دیگر دور موتورشم تا ۱۰هزار یا ۱۲هزار باشه مهم نیست .سپاسگزارم اگه راهنمایی بفرمایید یا احیانا همچین موتوری رو داشته باشید جهت فروش چون تو ۱سال گزشته همچین چیزی حتی با ۵برابر توان کمتر رو گیر نیاوردم
سلام
متأسفانه مدل خاصی با این مشخصات یا کلاً توان بالا ندیدم که معرفی کنم. البته اسپیندل دستگاههای سیانسی با توجه ۳ ۴ کیلووات تو بازار موجوده اما موتور براشلسی با توان ۲۰ کیلووات ندیدم.
سلام، از نرم افزار JMAG-Designer برای طراحی و انجام محاسبات موتور مورد نظرتون استفاده کنید.
سلام مطالب جالبی دارین فقط شماره ترانزیستور تومدار نیستش
سلام ببخشید میخواستم بدونم موتور a2212 2450kv
با ملخ ۱۰۴۵ جریان لحظه ای چند آمپر میکشه؟
لطفاً جواب بدید ممنون
سلام چرا به پایانه موتور dcبراش یک خازن عدسی متصل می کنند